项目名称:智能工业机器人通信芯片及协同定位技术
| 项目负责人 | 俞捷 |
| 承担单位 | 香港科技大学深港协同创新研究院(深圳福田) |
| 合作单位 | 佛山市国星半导体技术有限公司 |
| 技术领域 | 微电子与光电子 |
项目目标本子课题旨在研发智能工业机器人在现代化工厂室内环境下完成通信与协同的关键技术,本方案将分为三部分核心技术,包括基于先进LED的硅基可见光通信系统芯片研发,智能机器人可见光移动定位技术,以及基于可见光技术的智能机器人协同合作技术。三部分研究成果将相互支撑,构成统一的整体。 |
项目背景目前,绝大多数可见光通信系统均采用分立元件设计,不仅发射效率较低, 而且体积大、成本高。业界迫切需要提高可见光通信系统的集成度,同时提高速率、降低能耗与成本,促进可见光通信的大规模商用。此外,可见光通信定位技术仍然可以通过先进识别与定位算法进一步优化定位精度,为智能制造、智能工厂等行业的发展打下夯实基础。本项目将通过自主研发CMOS系统芯片(system on chip, SoC)实现高集成度的可见光通信系统,同时提高能效、降低成本,为可见光通信技术在国民经济各领域的大规模应用打下基础。基于高集成度可见光通信芯片,研发高精度定位及机器人团队协作系统,为智能制造厂商、智能工厂等提供高精度定位方案。 |
项目特色和创新点
|
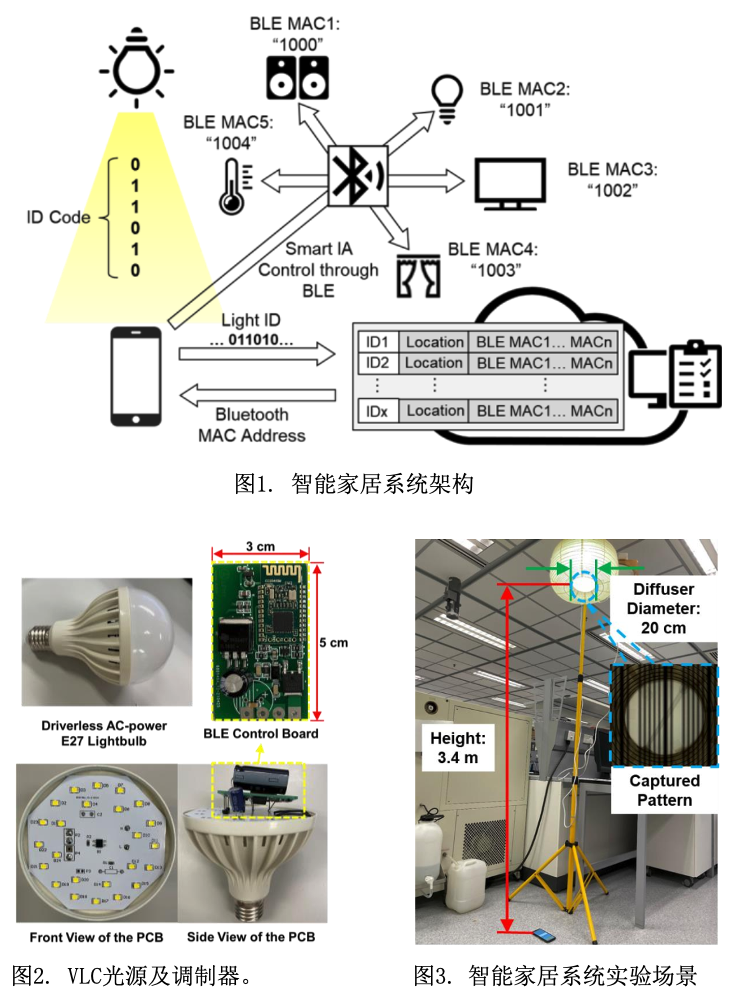
项目成果本项目提出了一种通过使用可见光通信技术(VLC)来管理控制智能家居设备的方案,这个智能家居控制系统由具备可见光通信功能的灯具、安装支持解码可见光信号APP的智能手机和存储数据的后端云服务器组成。作为核心硬件设备,可见光通信灯具被安装在天花板上并作为整个智能家居控制系统中的信标。该灯具所传输的可见光信号是由一个唯一识别码决定的,不同的灯具所传输的识别码也不相同。用户可以通过智能手机的摄像头拍摄并检测到此可见光信号,随后解码此信号的过程在安装的APP中完成,并且获取到的解码后的识别码信息将被发送到云服务器。云服务器中储存有这些灯具所安装的房间中所有智能家居设备的蓝牙MAC地址信息以及灯具的位置信息。通过匹配唯一识别码,用户可从云服务器获取定位信息及安装在与此灯具相同房间内的智能设备的蓝牙MAC地址,从而可以通过蓝牙连接轻松控制这些智能设备。为了进一步提高系统安全性,并提供方向控制功能,本发明还提出了一种使用从智能手机收集的方向角数据进行定位的三维室内定位算法。该算法旨在通过允许用户仅在某一特定位置激活智能设备来提高系统使用安全性。此外,该算法支持用户将智能手机指向特定方向,通过收集的方向角信息来控制对应方向上的智能家居设备,以实现便捷管理安装在一个房间中的多个相同设备的功能。本智能家居控制系统架构图,VLC光源及调制器,实验场景分别如下图1,2,3所示。
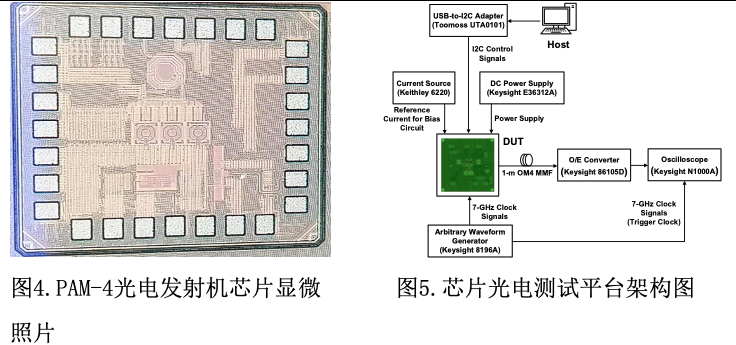
基于分段式混合均衡技术的PAM-4光电发射机芯片:本项目研发的PAM-4光电发射机基于四分之一速率及分段式架构设计,集成了片上低功耗锁相环、温度计码编码器、四比一高速多路选择器和光电驱动电路等模块。发射机运用前向反馈均衡技术、连续时间线性均衡技术和T型线圈,以分别补偿电路在中频段、中高频段和高频段的信号带宽。此外,发射机集成了预加重电路,从而解决LED及激光光源对信号上升沿和下降沿响应不对称的问题。发射机采用40-nm CMOS工艺设计,可兼容NRZ和PAM-4制式信号,在PAM-4模式下可实现高达56-Gb/s的数据传输速率,光调制幅度达1.8mW,能耗仅为1.9pJ/bit,本系统可用于支持可见光及可见激光通信。芯片已完成流片,及模组设计,进入测试验证阶段。
|