项目名称:适用于机器人的可见光定位算法及自动化LED建图技术
| 项目负责人 | 刘明 |
| 承担单位 | 香港科技大学深港协同创新研究院(深圳福田) |
| 合作单位 | 佛山市国星半导体技术有限公司 |
| 技术领域 | 智能制造、机器人与自主系统、物联网 |
项目目标目标是基于可见光通信和多传感器融合技术研发一套适用于机器人平台的高精度、低成本、大范围的实时三维定位系统以及适用于大规模部署场景的LED信标地图的自动化构建方法,在提供可靠定位的同时有效降低系统的实施成本。 |
项目背景可见光定位技术利用LED照明设施为机器人、物联网、智能制造等领域提供高精度定位。传统可见光定位方法依赖密集部署的可见光通信LED灯具,所需设施改造成本可能非常高,阻碍了其大规模采用。如何利用尽量少的LED灯具实现准确的三维定位并控制部署成本,是极具挑战性的。另一方面,LED在环境中的位置分布(即LED地图)是实现高精度定位的必要先验信息。在大规模场景中采用人工测绘方法将会费时费力,如何高效准确的构建LED地图也具有相当大的挑战性。 |
项目特色和创新点
|
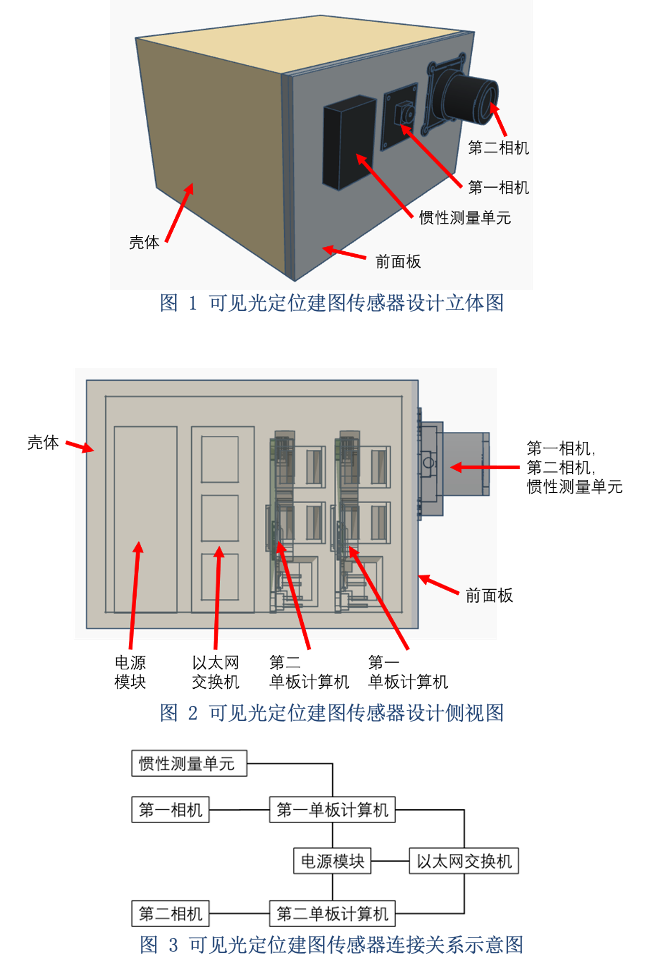
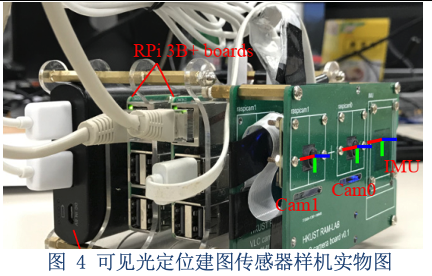
项目成果用于可见光定位和LED建图的设备研制 研制了一种用于可见光定位及LED建图的设备,其能够实现对可见光通信LED和对自然视觉特征的同时测量,并且可以提供惯性测量用以辅助可见光定位及LED建图。该设备包括:前面板、壳体、第一相机、第二相机、惯性测量单元、第一单板计算机、第二单板计算机、以太网交换机和电源模块。如图1所示,前面板用于安装第一相机、第二相机和惯性测量单元。如图2所示,壳体内安装第一单板计算机、第二单板计算机、以太网交换机和电源模块。各个模块的连接关系见图3。据此搭建的样机实物图见图4。第一相机为带有标准镜头的卷帘快门相机,被设置为很短的曝光时间,用于可见光通信和对LED的测量。第二相机为带有标准镜头(或广角镜头)的卷帘快门(或全局快门)相机,被设置为正常的曝光时间,用于对自然视觉特征的测量。第一单板计算机获取第一相机和惯性测量单元的数据,通过ROS发布到以太网交换机中。第二单板计算机获取第二相机数据,通过ROS发布到以太网交换机中。外部计算机设备通过以太网交换机获取LED测量、自然视觉特征测量和惯性测量数据,用于实现可见光定位和LED建图功能。
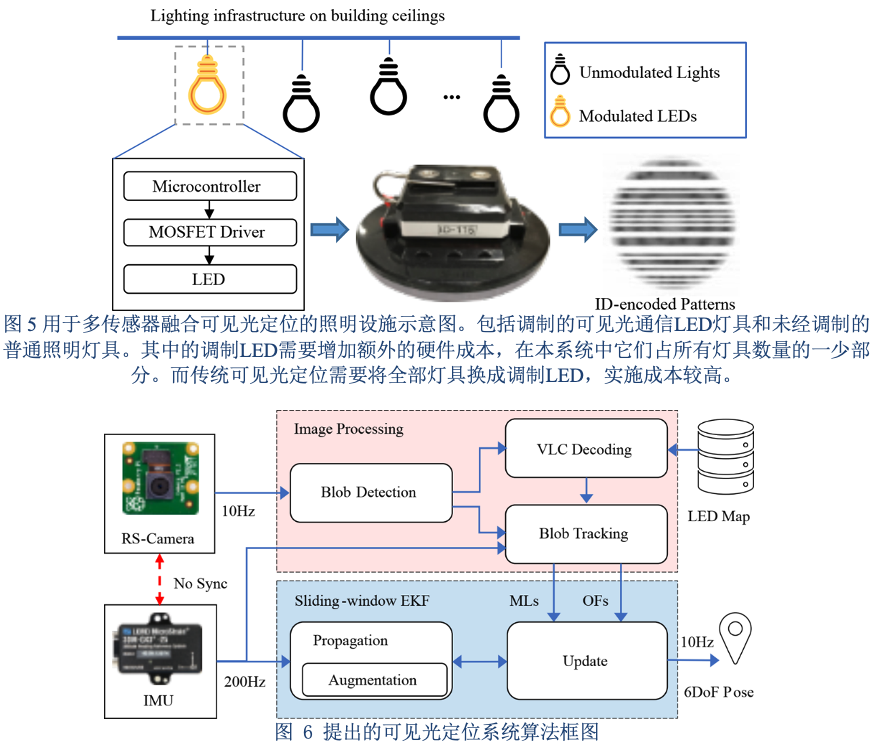
多传感器融合可见光定位 提出了一种新颖的多传感器融合可见光定位系统,它采用一个低成本的卷帘快门相机和IMU(惯性测量单元)作为传感器,仅仅利用环境中稀疏布置的可见光通信调制LED灯具即可得到持续、高精度的三维位置和方向信息。相比于传统的可见光定位,本系统在提供厘米级高精度定位的同时,大大降低了对调制LED部署密度的需求,从而节约系统实施成本。其关键创新点在于同时利用少量可见光通信LED灯和环境中已有的普通照明灯具作为定位信标。其中,可见光通信LED灯提供了必要的绝对位置参考,用于快速获得初始定位和校正累积的定位误差。而普通的照明灯具(不限于LED)提供了相对运动约束,可以有效降低可见光通信LED观测缺失期间的定位估计漂移。我们采用了滑动窗口滤波器将可见光通信LED的相机测量、普通灯具的相机测量和惯性测量数据做紧耦合处理,以实现持续的状态估计和提高定位准确性。我们通过详实的实验验证了所提系统的有效性。特别的,我们在5m*4m范围的测试场景中,仅利用3个可见光通信LED灯具实现了持续的高精度三维定位。其中三维位置误差小于10cm,三维方向误差小于2°,定位结果更新速率达到10Hz。图5展示了用于多传感器融合可见光定位的照明设施示意图。图6展示了系统采用的定位算法框图。图7展示了仅利用3个可见光通信LED进行实时定位的实验结果截图,其中红色方块代表调制LED的安装位置,白色斑点表示系统实时估计的普通灯具位置,红色轨迹表示真实的位置参考,绿色轨迹表示可见光定位结果。视频演示见:https://youtu.be/I7h1Ojv1-f8
|