项目名称:智能助力及高柔性协同作业系统控制策略研究
| 项目负责人 | 丘立 |
| 承担单位 | 广州市香港科大霍英东研究院 |
| 合作单位 | 佛山市威仕达新材料有限公司 |
| 技术领域 | 智能制造 |
项目目标
|
项目背景从2020年起开始的机器人4.0时代将出现各种颠覆性技术,如机器人网络、云上脑(Boc)、物智能(AIoT)、机器人感知技能等,这些都源于工业界和学术界对机器学习和人工智能等的开源发展方针,即不断提高机器人的智能性,以弥补各大机器人公司在机器人产品上设置的高价格门槛。本子课题也重点研究智能化传动中的控制策略和具体控制器的设计,及多机器人协同轨迹的跟踪实现,从而提高整套后道自动化设备的柔性,满足高效生产要求。 |
项目特色和创新点
|
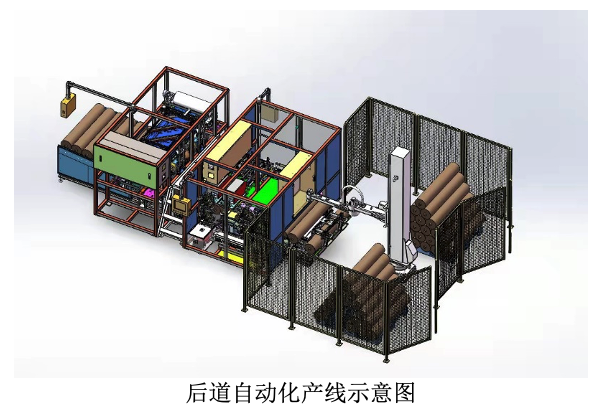
项目成果示范的自动化装备由下机移载、包装、贴标贴样、码垛等单元组成,实现一体化设计的同时又减少了占地,能更好的适应后道工序自动化改造的场地要求,能更好适应行业卷料规格以及包装方式多样化的需求,而且通过不同单元的灵活搭配,可以最大化行业通用性。
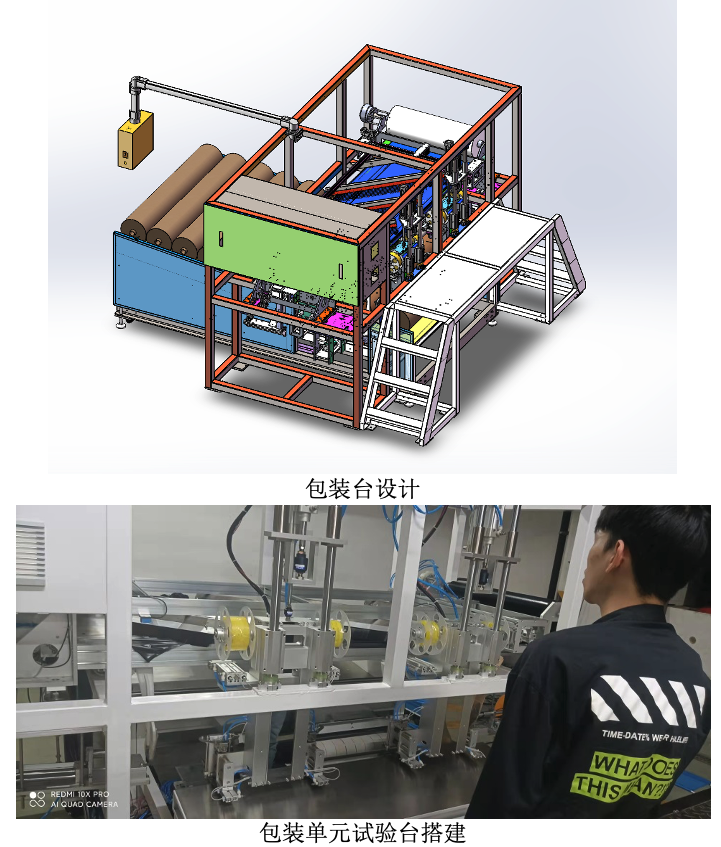
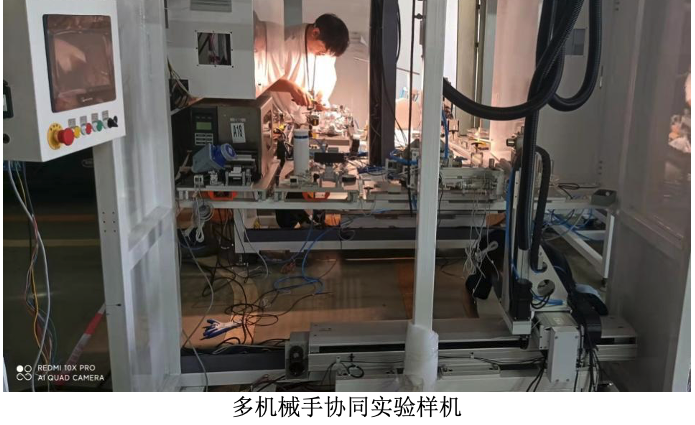
项目现已完成的内容及技术指标: 1. 基于多机械手协同的包装和贴标贴样单元已经完成,主要技术指标如下:指令响应周期0.5s;轨迹跟踪精度±2mm;定位精度X/Y/Z轴±1mm;最大贴标尺寸105×70mm;最大贴样尺寸50×50mm;最大包装规格:直径240mm×长度1420mm;
2. 码垛单元结构设计已经完成,电控设计仍在进行,待试制。
3.额外成果: 申请发明专利1项:专利申请号202111416456.2,一种包装膜连接模块及卷料自动化包装设备; 申请实用新型专利1项:专利申请号202122861189.1,一种卷料输送线及卷料自动化包装设备; |