项目名称:智能化传动机构及高柔性协同作业系统关键技术研究
| 项目负责人 | 王煜 |
| 承担单位 | 香港科技大学深港协同创新研究院(深圳福田) |
| 合作单位 | 佛山市威仕达新材料有限公司 |
| 技术领域 | 智能制造 |
项目目标理想中能解决卷料行业技术瓶颈的是低成本、高柔性、高可靠的自动化高端装备。该类装备源于汽车行业,装配线的智能助力设备(Intelligent Assist Device, IAD)开启了协作机器人(Collaborative Robot, Cobot)时代,以智能化的传动机构降低机器人控制自由度,将机构的动力性和人的灵巧性深度融合,提高了复杂操作的可实现性,并大幅减少了机器人投资成本。 |
项目背景卡板纸卷、塑料膜卷、薄金属卷(如图1所示)等卷料是造纸和包装等行业的重要生产对象或生产物料,规模企业年产值多为亿元以上。这几类卷料的前道制作过程,除个别工序外,已基本实现自动化,而后道工序仍依赖手工,存在强度大、工伤多、招工难等问题,企业普遍面临成本及管理的压力,亟需自动化解决方案。 |
项目特色和创新点
|
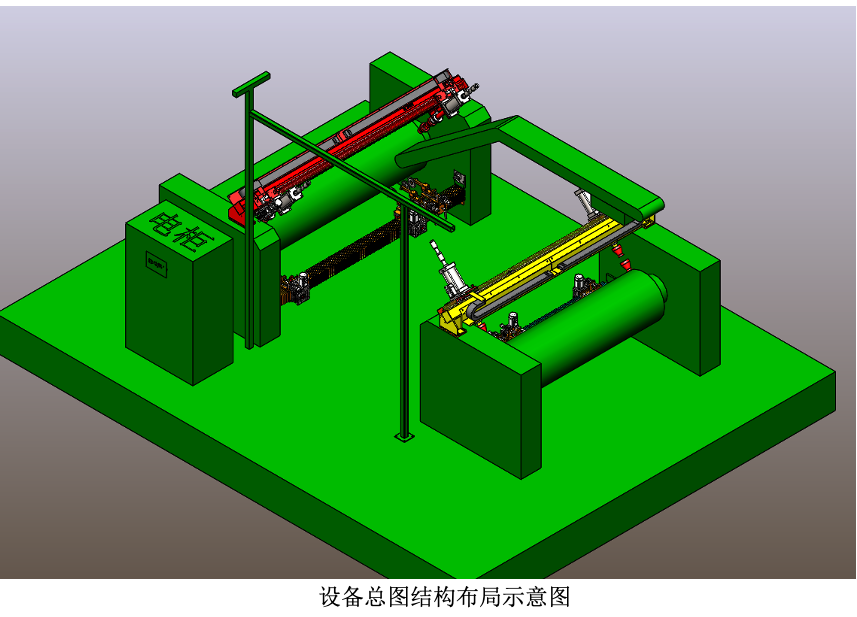
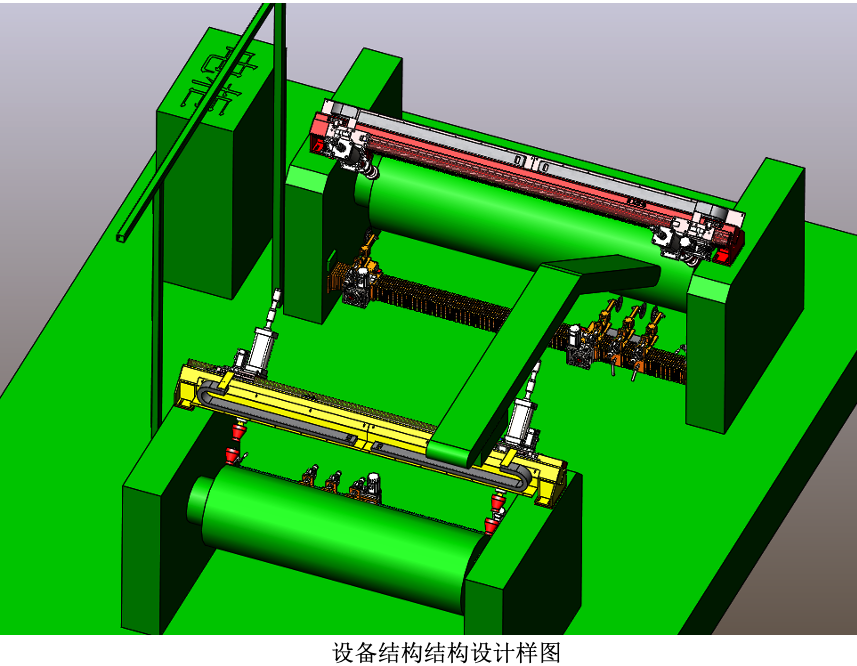
项目成果示范的装备由导料机构、固定切割手臂、移动切割手臂、移动导向手臂、安全防护单元组成,能应对现场复杂的生产环境,对不同规格的卷料实现混料、切割,能最大程度减少人员的直接参与,解决现场人员劳动强度和安全性。产品研发试验可以应对市场上大多数需要完成胶料混料及切割的工艺,能在行业内解决通用性问题。
项目现已完成的内容及技术指标: 基于多手臂协同作业,实现混料切割,主要技术指标已完成:可实现在生产温度80°以内稳定生产;实现人工远程操作确保生产安全性;手臂动作指令化控制,人员可对手臂移动、切割时间进行指令控制,根据胶料的不同调整混料时间及混料轨迹;单动混料时间设定30S一个周期,手臂移动速度1m/S,负载200kg,轨迹规划周期0.1S以内,指令响应周期0.5S以内。轨迹跟踪精度±2mm,定位精度;X方向(轴向±2mm,Y/Z方向±1mm),最大混料长度3000mm,可与客户上下游设备通讯及信号对接并反馈,实现联合生产,保护主体滚轧设备,达到产品最终工艺需求
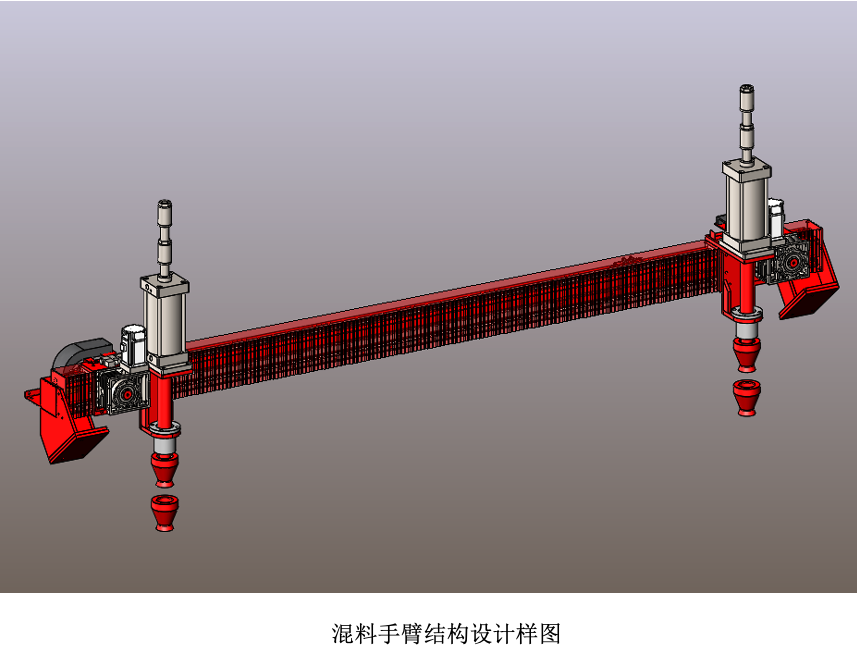
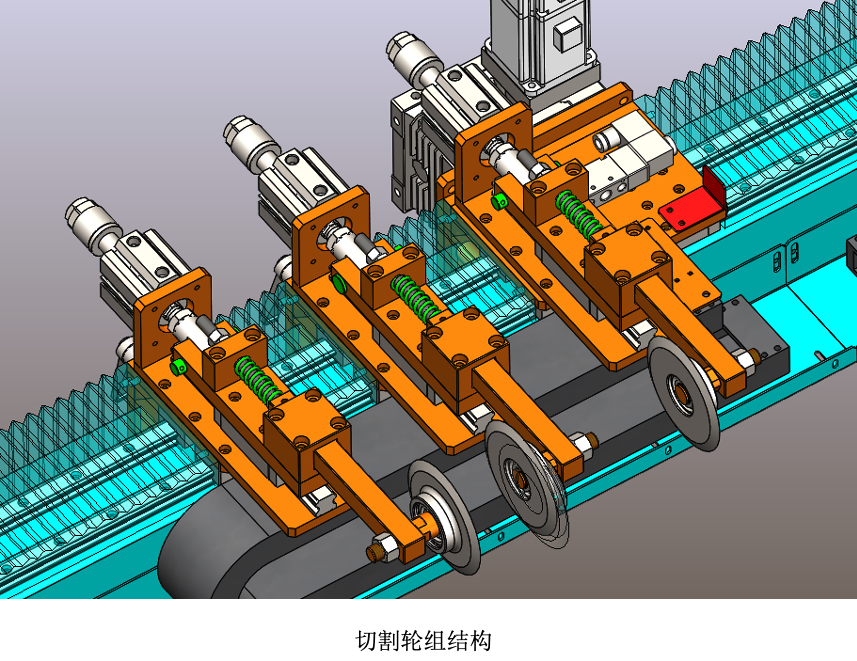
切割手臂及混料手臂能实现X/Y动作,确保手臂安全和客户主体滚轧设备安全,手臂切割到头采取随动设计,实现±90自由选装,根据实际混料工艺移动手臂时实现随动,最大限度保证混料和切割的灵活性。
额外成果: 申请发明专利1项: 申请实用新型专利1项: |