项目名称:用于工业物联网的可见光通信与定位系统
| 项目负责人 | 俞捷 |
| 承担单位 | 香港科技大学深港协同创新研究院(深圳福田) |
| 合作单位 | 佛山市国星半导体技术有限公司 |
| 技术领域 | 微电子与光电子 |
项目目标项目以智能制造为主题,针对工业4.0、工业物联网、先进人机交互等领域对高速通信与精准定位的迫切需求,研发基于可见光技术的智能工业机器人室内通信与定位一体化系统。从LED芯片制造、可见光通信调制器芯片设计、大规模LED信标地图构建、多源融合可见光定位算法到智能工业机器人通信及协同定位,形成软硬件全面升级的智能工业机器人通信与定位技术方案,解决传统蓝牙、WIFI、RFID、UWB等室内定位技术在覆盖范围、部署成本、定位精度及抗干扰等方面的不足之处。同时在机器人操作系统(ROS)Android公共平台上开发一个高定位精度、低延迟的可见光通信与协同定位系统,协同控制多机器人系统,降低大型制造工厂的超大人力资源需求,促进智能制造相关产业高质量发展。 |
项目背景伴随着新基建进程提速,工业物联网担负起传统制造业转型升级的重任,在人口老龄化加速与劳动力成本提升的背景下,智能工厂将是大势所趋,这也加速了工业机器人的普及进程。在工业4.0时代,机器人、工业设备和互联网的整合,可以提高工厂的生产率,节约人力资源。其中智能机器人的室内通信、协同定位及导航是人机交互的关键技术。而对于室内通信与定位,传统卫星、射频等定位技术在精度、延迟、范围及抗干扰等方面存在不足。得益于LED的高带宽、无多径效应等优势,可见光室内通信及定位技术有望支持机器人高速通信、高精定位及导航。因此,攻克可见光通信芯片核心技术,配套研发机器人协同算法,将为智能机器人在工厂的部署提供关键技术支持。 |
项目特色和创新点1)芯片及硬件设计技术:
2)机器人室内定位技术:
3)多机器人协同技术
|
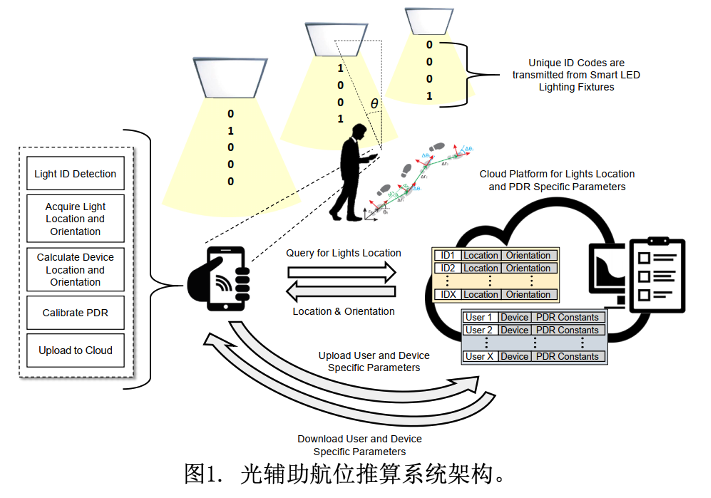
项目成果整合产出: 本项目提出了一种光辅助航位推算(LiDR)系统,旨在解决传统可见光定位(VLP)和行人航位推算(PDR)存在的精度低,可移植性差,易受挡光障碍物影响等问题。本系统使用照明LED作为高精度位置地标,为 PDR 提供定期校准,并估计单个行人的步长以提高准确性。此外,本工作提出了一种基于光形的航向角校正算法,以减少航向角误差,进一步提高精度。该系统实现为基于 Android 的导航应用程序,具有数字地图和基于云的后端存储位置、设备和用户特定参数。该系统的实时性能在 450 平方米的实验室和 150 米的步行道上进行评估。实验结果表明,在最大光间距为 15 m 的情况下,整个系统的总体平均精度可以达到 < 0.7 m。整体系统架构如下图所示。本工作已发表于中科院分区一区期刊IEEE Internet of Things Journal。
|